
Sistem Kendali Proporsional pada Robot Penghindar Halangan (Avoider) Pioneer P3-DX
Abstrak
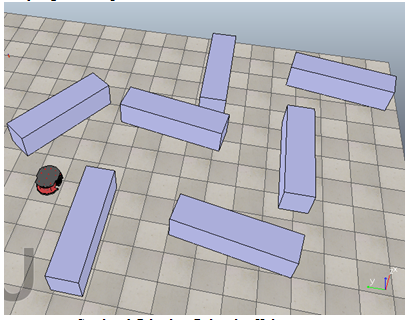
Kemampuan dasar yang harus dimiliki oleh mobile robot adalah menghindari halangan, dengan dapatnya robot menghindari halangan, robot akan mampu melakukan tugas dengan baik tanpa harus menabrak halangan yang ada, karena dengan menabrak halangan akan membuat robot semakin lama menyelesaikan misi bahkan robot dapat mengalami disorientasi sikap, dengan diterapkannya sistem kendali pada robot penghindar halangan membuat robot dapat mengatasi halangan yang ada. Kendali proporsional merupakan kendali sederhana dan mudah digunakan pada mobile robot, dengan delapan sensor yang ada pada robot membuat robot lebih peka terhadap halangan yang ada di depannya sehingga digunakanlah mobile robot jenis Pioneer P3-DX dalam penelitian ini. Robot telah mampu melewati halangan yang ada dengan nilai Kp sebesar 2 dan kecepatan konstan sebesar 4 tanpa menabraknya.
##plugins.generic.usageStats.downloads##
Referensi
[2] A. Nurkholis, A. Riyantomo dan M. Tafrikan, “Sistem pakar penyakit lambung menggunakan metode forward chaining,” Majalah Ilmiah Momentum, vol. 13, no. 1, 2017.
[3] S. Badillo et al., An Introduction to Machine Learning Clin. Pharmacol. Ther., 2020.
[4] R. M. R. Ridwansyah and Z. Abidin, “Sistem Kontrol Pada Self Driving Car (Mobil Tanpa Kemudi) Buatan Perusahaan Google Yang Didukung Oleh GPS,” p. 8, 2019.
[5] D. Rahmat Zuliyanto and G. Hermawan2, “Implementasi Algoritma Fuzzy Logic Pada Autonomous Mobile Robot Untuk Kasus Pendeteksian Halangan,” J. Ilm. Komput. Dan Inform. KOMPUTA, p. 9, 2016.
[6] E. Rohmer, S. P. Singh, and M. Freese, “V-REP: A versatile and scalable robot simulation framework,” In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), November 2013, pp. 1321-1326.
[7] T. Susanto, S. D. Riskiono, and A. Nurkholis, “IMPLEMENTASI KENDALI LQR UNTUK PENGENDALIAN SIKAP LONGITUDINAL PESAWAT FLYING WING,” J. Electro Luceat, vol. 6, no. 2, p. 10, 2020.
[8] T. Susanto and S. Ahdan, “Pengendalian Sikap Lateral Pesawat Flying wing Menggunakan Metode LQR,” PRotek J. Ilm. Tek. Elektro, vol. 7, no. 2, pp. 99–103, Sep. 2020, doi: 10.33387/protk.v7i2.2034.
[9] M. Amin and M. S. Novelan, “Sistem Kendali Obstacle Avoidance Robot Sebagai Prototype Social Distancing Menggunakan Sensor Ultrasonic dan Arduino,” vol. 5, p. 6, 2020.
[10] E. D. Marindani, “Robot Mobile Penghindar Halangan (Avoider Mobile Robot) Berbasis Mikrokontroler AT89S5,” p. 7, 2011.
[11] O. Oky, “PERANCANGAN ROBOT AVOIDER BERBASIS ARDUINO UNO MENGGUNAKAN TIGA SENSOR ULTRASONIK,” EPIC J. Electr. Power Instrum. Control, vol. 1, no. 2, Jul. 2018, doi: 10.32493/epic.v1i2.1529.
[12] S. Samsugi and D. Kastutara, “INTERNET OF THINGS (IOT): Sistem Kendali Jarak Jauh Berbasis Arduino Dan Modul Wifi Esp8266,” p. 8, 2017.
[13] E. Apriaskar, F. Fahmizal, I. Cahyani, and A. Mayub, “Autonomous Mobile Robot based on BehaviourBased Robotic using V-REP Simulator–Pioneer P3-DX Robot,” J. Rekayasa Elektr., vol. 16, no. 1, May 2020, doi: 10.17529/jre.v16i1.15081.
[14] M. N. Riandana, I. N. Budiastra, and C. G. I. Partha, “Aplikasi Sensor Cahaya Sebagai Sensor Garis Pada Robot Berbasis Kontrol PID Dengan Pengaturan Kepekaan Cahaya Otomatis,” Maj. Ilm. Teknol. Elektro, vol. 16, no. 3, p. 56, Dec. 2017, doi: 10.24843/MITE.2017.v16i03p10.
[15] I. Qosim and M. Mujirudin, “Analisis Pengaturan Kecepatan Motor DC Menggunakan Kontrol PID (Proportional Integral Derivative),” vol. 2, no. 2502, p. 6, 2017.
[16] M. Freese, S. Singh, F. Ozaki, and N. Matsuhira, “Virtual robot experimentation platform V-REP: A Versatile 3D Robot Simulator,” In International Conference on Simulation, Modeling, and Programming for Autonomous Robots, November 2010, pp. 51-62.
[17] S. Azak and E. Erdogan, “Performance evaluation of the grid-based FastSLAM in V-REP using MATLAB,” in 2018 14th International Conference on Advanced Trends in Radioelecrtronics, Telecommunications and Computer Engineering (TCSET), Lviv-Slavske, Ukraine, Feb. 2018, pp. 276–281, doi: 10.1109/TCSET.2018.8336202.
[18] H. Batti, C. B. Jabeur and H. Seddik, "Mobile Robot Obstacle Avoidance in labyrinth Environment Using Fuzzy Logic Approach," 2019 International Conference on Control, Automation and Diagnosis (ICCAD), Grenoble, France, 2019, pp. 1-5, doi: 10.1109/ICCAD46983.2019.9037873.
[19] A. Pandey, V. S. Panwar, M. E. Hasan, and D. R. Parhi, “V-REP-based navigation of automated wheeled robot between obstacles using PSO-tuned feedforward neural network,” J. Comput. Des. Eng., vol. 7, no. 4, pp. 427–434, Aug. 2020, doi: 10.1093/jcde/qwaa035.
[20] H. Li, “User Interface of Indoor Mapping based on Project TANGO,” Int. Conf. Indoor Position. Indoor Navig. IPIN, p. 5, 2016.
[21] Rajmohan, Gowtham. obstacle detection and avoidance methods for autonomous mobile robot. 10.13140/RG.2.1.4463.2567, 2016.
[22] W. Purbowaskito and C.-H. Hsu, “Sistem Kendali PID untuk Pengendalian Kecepatan Motor Penggerak Unmanned Ground Vehicle untuk Aplikasi Industri Pertanian,” J. INFOTEL, vol. 9, no. 4, p. 376, Nov. 2017, doi: 10.20895/infotel.v9i4.253.
[23] Iswanto, Alfian Ma’arif, Riky Dwi Puriyanto, Nia Maharani Raharja, Safinta Nurindra Rahmadhia, “Arduino Embedded Control System of DC Motor Using Proportional Integral Derivative”, IJCA, vol. 13, no. 4, pp. 658 - 667, May 2020.
[24] R. Arindya, U. Satyagama, J. K. R. No, and A. J. Barat, “Penalaan Kendali PID untuk Pengendali Proses,” vol. 8, no. 2, p. 8, 2017.
[25] P. A. Ashokbhai and V. G. Savani, “Performance Analysis of PID Controller and Its significance for Closed Loop System,” Int. J. Eng. Res., vol. 3, no. 3, p. 5, 2014.
[26] S. C. Purbarani, Q. A’yunina, M. A. Ma’sum, and M. F. Rachmadi, “Simulation Of Landmark Approach For Wall Following Algorithm On Fire-Fighting Robot Using V-Rep,” J. Ilmu Komput. Dan Inf., vol. 8, no. 2, p. 100, Aug. 2015, doi: 10.21609/jiki.v8i2.308.

This work is licensed under a Creative Commons Attribution 4.0 International License

